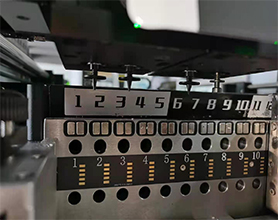
ピックアンドプレイスマシンを使用する過程で、ピックアンドプレイスマシンの視覚認識システムを理解する。このシステムでは,電流成分,回路基板または吸引ノズルの位置をより正確に決定することができる。ピックアンドプレイスマシンは、より正確なピックアンドプレイスメソッドを提供します。
と何度も、我々が我々の配置操作を完了するためにPickとPlaceマシンを使うとき、我々の不適当なセッティングまたは発見エラーのために、選ばれて、置かれる部品は相殺されます。この状況は、私たちが見たくない結果であり、それからコンポーネントオフセットの問題をどのように解決すべきか?このシステムがどのように構成されているか理解できますか?レット&シュガーsは、それを一緒に見ます。
(3)レーザアライメントシステムこのシステムを使用して,ピックアンドプレース機システムのコンポーネントのサイズと形状を測定できる。利点は、整列速度が速く、精度が高いことである。欠点はピンや部品にピンの検査ができないことである。第二百三十三万七百九十九条ピック&プレースマシンの変更
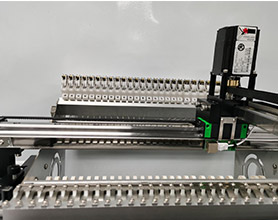
(1)の配置方向は、ハードウェアの設定に調整を行う必要があります、ピックアップの位置と位置を調整し、ヘッド、吸引ノズル、位置とマシンの位置を選択します。我々がこの方法を使うならば、PickとPlaceマシンの最終的な配置効果と精度は高くありません。この方法は高精度を必要としない製品に使用することができる。精度のある要件があれば、別の方法を使います。認識システムを使用してシステム管理ソフトウェアの水平軸と垂直軸の位置情報を調整すると同時に、吸引ノズルの向きや位置を変更するために、認識システムを使用する必要がある。ほとんどの場合,この方法は加工作業に対して行うことができる。第3,353,567,890(3)最初に認識作業であり,水平軸と垂直軸と吸引ノズルの簡単な処理を行う。次のステップは認識システムを修正することです。選択されて配置される部品が認識システムを通過するときに、像認識機能は完了できる。そして、コンポーネントの位置を識別するためにピックおよびプレースマシンの機能はなしとげられることが可能である。
 English
English 日本語
日本語 한국어
한국어 français
français Deutsch
Deutsch Español
Español italiano
italiano русский
русский português
português العربية
العربية tiếng việt
tiếng việt